Variable Frequency Drives (VFD)
A little background on Three-phase Induction motors and AC Motor drives
Like single-phase motors, three-phase motors operate on the principle of induction. They are composed of a rotor and a stator with no brushes or physical contact between the rotor and the stator. The three most common types of 3-phase motors are: 1- Squirrel-cage induction 2- Wound rotor induction 3- Synchronous
3-phase motor operation
The stator is the stationary part of the motor, while the rotor is the rotating part. Like the single-phase motor, the 3-phase motor requires a rotating magnetic field. Unlike the single-phase motor, the 3-phase motor does not require any additional components to produce this rotating magnetic field. Each phase is placed in the motor so that it is 120 electrical degrees from the other phases. Since each phase reaches its peak value 120 degrees apart from the other phases, a rotating magnetic field is produced. Electrical motors convert electric energy into mechanical energy by electromagnetic induction. These motors are characterized by:
Fixed speed – determined by the frequency of the power supply and fixed torque. Obviously, a fixed speed motor is not suitable for all processes in all circumstances, thus the need for adjusting the speed according to need. Industrial machinery is often driven by electrical motors that have provisions for speed adjustment. Such motors are simply larger, more powerful versions of those driving familiar appliances such as food blenders or electrical drills which normally operate at a fixed speed.
Although many different induction motor control techniques are in practice today, the most popular control technique is by generating a variable frequency power supply, which has a constant voltage to frequency ratio. This is technique is popularly known as a V/F control.
The conventional approach to motor control is to first convert the line voltage into DC. DC is again converted to single or three-phase AC as per load requirements, as shown in Figure 1. The output voltage, frequency, or both of the inverter can be controlled by the application of power electronics and micro-controller. Closed-loop control is normally required to satisfy the steady-state and transient performance specifications of ac drives.
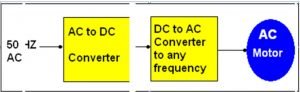
Figure 1
The relation between synchronous speed, rotor speed, and the slip is given by the equation in Figure 2.
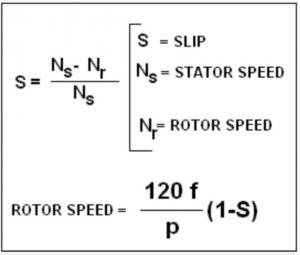
Figure 2
Thus, the speed of an induction motor depends on the slip (S), frequency of the stator (f), and the number of poles. The ability for varying any one of the above three quantities will provide methods of speed control of an induction motor. THE constant V/F method is commonly used for constant and variable speed control of induction motor. If speed control is required, that controller is called a (variable speed) AC drive. An AC drive is a device that is used to control the speed of an electric motor, either an induction motor or asynchronous motor. AC drives are also known by various other names such as adjustable frequency drives (AFD), variable frequency drives (VFD), variable speed drives (VSD), or frequency converters (FC).
Application of a VFD AC motor driver
I select DELTA’s VFD-004M model of AC motor drive to replace the 12 V DC motor which I used as the hoist in my previous version of the 4 Floor Elevator project.
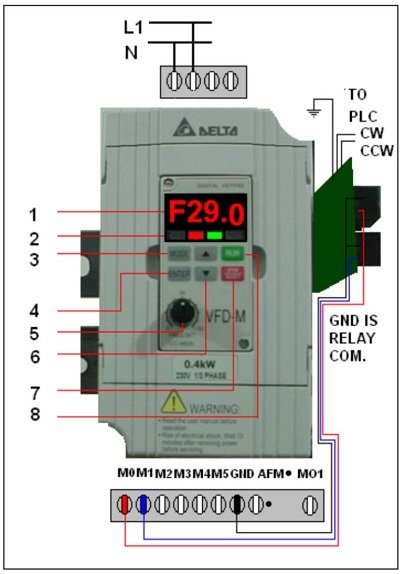
Description of Digital Keypad
The digital keypad includes two parts: a display panel and keypad. The display panel displays the parameters and the operation status of the AC drive as well. The keypad provides a programming and control interface. See Figure 3.
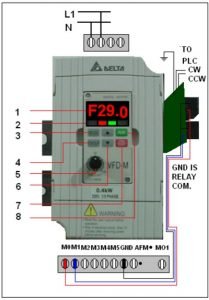
Figure 3
In figure 3:
1 – LED display indicates the motor and drive parameters.
2 – Lamp lights up during RUN, STOP, FWD & REV operation.
3 – Program/Function mode key. Selects normal mode or program mode. Displays the AC drive status, such as output freq. select the parameters.
4 – Enter Key. Press ENTER after keying in the selected parameters or change of data.
5 – Potentiometer. For the master, frequency setting refers to Pr.00.
6 – UP and Down Key. Sets the parameter number or changes the numerical data as the freq. reference.
7 – REV operation indicator.
8 – RUN operation indicator.
What we want to do now is to set the Driver parameters, such as to get it to operate similar to our original 12 V DC hoist motor. PLC must be able to get the 3-phase motor to RUN CW or CCW. Based on the user manual which comes with the AC driver, we need to set the parameters to get the Driver function as we want. See Figure 4.

Figure 4
Setting Pr.38 requires us to add a small circuit to set M0 = 0 to get motor FWD/STOP status, or M1 = 0, to get motor REV/STOP. See Figure 5.
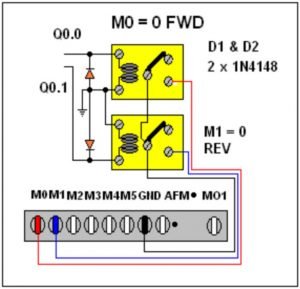
Figure 5
To see more product details, click HERE

1 Comment
wow and excellent piece of information here, thanks ..!
Comments are closed.